


ABSTRACT
Background Adult spinal deformity surgery requires use of long thoracolumbar instrumentation, which is associated with risk of postoperative proximal junctional kyphosis (PJK). Tethering has been used in spinal surgery but not around the spinous process (SP) in the context of preventing PJK.
Methods Researchers applied a nondestructive hybrid loading protocol to 7 T8–L2 cadaveric specimens in flexion-extension, lateral bending, and axial rotation (AR). A rigid construct (pedicle screws and rods) and 1- and 2-level SP constructs were tested, as was a hand-tie technique. SP tethering (SPT) constructs use clamps on both sides of the SP; SPT helix constructs use 1 clamp and wrap around the SP.
Results All tether constructs showed greater motion at the instrumented level and less motion at adjacent levels compared to rigid constructs. In AR, 1- and 2-level SPT constructs restricted first instrumented level motion to a greater extent when compared with other tether constructs (P ≤ .05). Passing the band through the T10 SP did not produce significant biomechanical differences compared to passing it through the T9–T10 interspinous ligament (P > .05). Hand-tied constructs demonstrated more motion compared to tensioned constructs (P > .05). Intradiscal pressure results corroborated motion data.
Conclusions SPT at the proximal end of a rigid construct produced more favorable biomechanical outcomes at instrumented and adjacent levels than were seen with a completely rigid construct. Clinical research is needed to determine whether these methods reduce the risk of PJK among patients.
Level of Evidence 3.
Clinical Relevance This work sheds light on the biomechanical stability of proximal tethering constructs in an effort to enhance the surgeon's ability to reduce rates of proximal junctional kyphosis and failure in thoracolumbar spinal fusion surgery.
INTRODUCTION
Correction for spinal deformity often requires long thoracolumbar posterior instrumentation that may cause damage to supporting soft tissue structures. Use of rigid pedicle screw and rod constructs can lead to an abrupt transition from a stiff fused segment to an unfused mobile motion segment.1 This change in motion parameters, combined with sagittal plane misalignment, may result in postoperative clinical complications such as proximal junctional kyphosis (PJK) or even proximal junctional failure (PJF). These 2 entities should be viewed on a spectrum of adjacent segment degeneration. PJK is defined by the presence of >20° of kyphosis between the upper instrumented vertebra (UIV) and the superior endplate 2 levels above.2,3 PJK is often viewed primarily as a radiographic finding and often presents with few or only mild symptoms.4–7 PJK should be contrasted with PJF, which involves increased pain, mechanical instability, possible neurologic injury, and the need for revision surgery.6–8
The reported incidence of PJK varies considerably and can range from 17% to 39% among patients who have previously been treated for reconstruction of scoliotic deformity or kyphosis4 to 5% to 46% or even 80% within 18 months according to a recent large systematic review.8 PJF, on the other hand, occurs at a slightly more modest rate of 1.4% to 35%.7 It is thought to originate from high junctional stress caused by long fusion constructs, whereby a multitude of risk factors increase the probability of adjacent degeneration. Fracture at the UIV is the most common mechanism for PJK.4,9 Risk factors include low bone density, advancing age, greater number of levels instrumented (including fusion to sacrum), incorrect global spinal alignment, and sagittal vertical axis position.4,8,9 Despite the ubiquitous population affected by PJK, Kim et al,4 upon review of the literature, found no significant differences in health-related outcome scores; however, many patients were symptomatic and required revision surgery.
One solution that has been proposed to lessen the severity of stiffness changes associated with posterior instrumentation involves dynamic stabilization at UIVs of long fusion constructs. It is thought that junctional stresses would be reduced by gradual changes in flexibility, thus decreasing the pervasiveness of PJK. Cahill et al10 used finite element analysis to compare forces between a homogenous diameter rod and a transitional diameter rod; results showed a reduction in implant failure. Other stabilization techniques including pedicle screw, hook, and hybrid constructs have previously been studied in the literature. Results show that pedicle screw fixation significantly increases PJK, whereas hooks and hybrid constructs are more effective in decreasing proximal kyphosis.11–13
Bands and wires also may be used for posterior fixation, are available in different diameters, and consist of various materials such as stainless steel, titanium, and polyethylene terephthalate (PET). Polyethylene or polyester bands provide larger diameter stabilization and better biocompatibility when compared with metal wiring.14–17 Universal clamps with polyester bands have been used to correct deformity successfully,14,16,18–21 but the prevalence of associated PJK has not been determined. Additionally, band fixation often requires passing the bands under the lamina, which increases the risk of neurologic damage or dural injury due to positioning the band directly next to the spinal cord. The use of tethering bands around the spinous process (SP) to avoid such complications and reduce the risk of PJK, however, has not been investigated. As such, the present study aims to investigate the use of SP PET band constructs proximal to the posterior rods and screws. The authors hypothesize that SP PET reconstruction creates a gradual transfer of motion and intradiscal force at the proximal levels.
MATERIAL AND METHODS
Specimen Preparation
Seven fresh-frozen cadaveric spines were radiographed at T8–L2 in both anteroposterior and lateral planes to ensure lack of visible degeneration, osteophytes, malalignments, or instability. Specimens were then stored in double plastic bags at −20°C. Muscular structures and excess fat were carefully removed, while spinal ligaments, joints, and discs were preserved. Spines were fixed proximally and distally for fixation in a 3-to-1 mixture of Bondo Body Filler and fiberglass resin (Bondo/MarHyde Corp., Atlanta, GA).
Surgical Reconstruction
We investigated motion and intradiscal pressure (IDP) of the multiple single- and multilevel SP tethering (SPT) techniques, in addition to the intact condition and pedicle screws and rods (T10–L2; rigid) constructs (Figure 1). Single-level SPT included rigid pedicle screw fixation (T11–L2) and featured: (1) T10 bilateral SPT tensioned to 275 N, as recommended by the manufacturer (SPT 1); (2) T10 helical SPT wrapped around the T10 and T11 process and tensioned to 275 N (SPT Helix 1); SPT Helix 1 hand-tied (not tensioned; SPT Helix HT 1); and transhelical SPT passing through the T10–T11 interspinous ligament and tensioned to 275 N around the T11 SP (SPT Trans-Helix 1). Similarly, multilevel SPT included rigid fixation (T12–L2) and featured: (1) SPT 2 with bilateral SPT at T10 and T11, tensioned to 275 N; (2) SPT Helix 2, with SPT helically tensioned around the T10, T11, and T12 processes; and (3) SPT Trans-Helix 2, with transhelical SPT passing through the T10–T11 and T11–T12 interspinous ligament, tensioned to 275 N around the T11 and T12 processes. The proximal thoracic level instrumented with screws and rods were adjusted based on single- and multilevel tethering reconstruction such that the adjacent and first instrumented anatomic levels would be consistent throughout the study (T11 for single-level tethering, and T12 for multilevel tethering).

Schematic images depicting all 8 tether constructs (T8–L2). From left to right: (1) rigid, (2) SPT 1, (3) SPT Helix HT, (4) SPT Helix 1, (5) SPT Trans-Helix 1, (6) SPT 2, (7) SPT Helix 2, and (8) SPT Trans-Helix 2.
All constructs used standard pedicle screw fixation (REVERE Stabilization System, Globus Medical, Inc., Audubon, PA) and/or PET band fixation (SILC Fixation System, Globus Medical, Inc.). The tether constructs, except for the hand-tied construct, were tensioned to 275 N, followed by tightening of the set screw to a torque of 5.5 Nm. The band of the hand-tied construct was manually tied in a knot. Transhelix constructs required the use of a burr to create a path through the SP for passage of the tether (Figure 2).
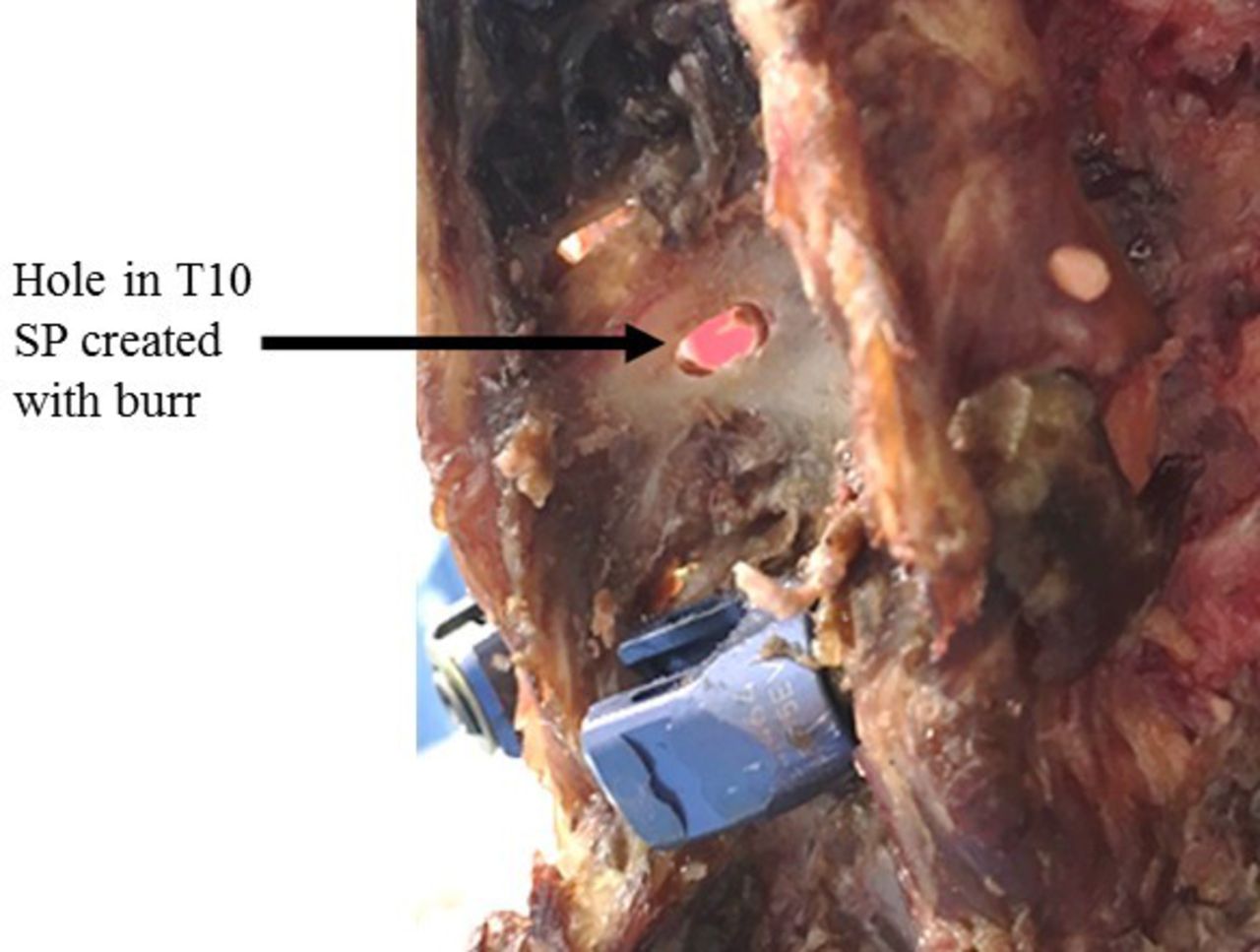
Photograph of interspinous ligament hole necessary for the transhelix tethering construct.
Multidirectional Testing
Each specimen was thawed overnight and was affixed to a custom 6 degrees of freedom (6DOF) testing apparatus used to simulate physiological loads. Modeled after the spinal loading simulator proposed by Wilke et al,22 the cranial (T8) portion of the specimen was affixed to a 6DOF motor gimbal assembly which applied a pure, unconstrained rotational moment independently about the X, Y, and Z axes corresponding to flexion-extension (FE), lateral bending (LB), and axial rotation (AR). The gimbal assembly attaches to the test platform which includes linear air-bearing guide rails (X and Z axes) and pneumatic-controlled linear actuator (Y axis) enabling pure, unconstrained translation. Because the motion was unconstrained, the axis of the applied moment was constantly oriented with respect to the proximal-most vertebral level (T8). Only the caudal end of the specimen (L2) was fixed in space, as it was secured to a static, constrained testing platform. A load control protocol with servomotors will apply a pure, unconstrained bending moment, caudally, at a rate of 1.0°/s, to a maximum moment of ±5 Nm23 in FE, LB, and AR. Three load cycles were applied in FE, LB, and AR during quasistatic multidirectional motion testing.
Plexiglass markers, each with 3 infrared light-emitting diodes, were secured rigidly to T8, T9, T10, T11, and T12 vertebrae via bone screws to track motion, and the motion analysis system (Optotrak Certus, Northern Digital, Inc., Waterloo, Ontario, Canada) was placed approximately 1.8 m in front of the specimen. Markers denoting a rigid body were aligned along the sagittal curvature of the spine. Optotrak Certus software superimposed the coordinate systems of 2 adjacent vertebral bodies to inferentially determine relative Eulerian rotations about each of the 3 axes. At an optimal setup defined by the manufacturer, translational and rotational resolutions of 0.01 mm and 0.1° and errors between 1.6% and 1.8% can be obtained.24,25 Stability of the tested constructs was assessed through measurement of peak-to-peak range of motion (ROM) reported across the adjacent level (T9–T10), first instrumented level (T10–T11), and second instrumented level (T11–T12). Data were collected during the third cycle to minimize the viscoelastic behavior of the tissues and normalized to the intact condition per specimen.
Intradiscal Pressure (IDP)
Miniature pressure transducers (Model 060, Precision Measurements Co., Ann Arbor, MI) were used to measure changes in axial loads within the adjacent level (T9–T10) and first instrumented level (T10–T11) disc spaces. The sensors used are designed for use in biomedical and biological applications with a sensing diameter of 1.5 mm and 0.3 mm thickness. Placement of the transducers within the nucleus pulposus first required a 14-gauge cannulated needle to be inserted through the anterior annulus, as recommended in literature.26 The trocar was removed, and the transducer was inserted through the cannula with the active surface facing cranially. Each transducer was placed within the center of the disc and confirmed with coronal and lateral fluoroscopy. Then the cannula was carefully withdrawn as not to disturb the placed transducer; final position of the transducers was again confirmed with fluoroscopy. Once the cannulated needle was removed, the displaced annulus fibers returned to their position, surrounding the flexible cables of the transducer. IDP was collected during FE, the motion plane that produces the largest change in hydrostatic pressure within the disc.26 All sensors were calibrated to manufacturer specifications before multidirectional testing. IDP data were acquired by using a multichannel digital acquisition device (National Instruments Corporation, Austin, TX) interfaced with a personal computer. IDP data were normalized to the intact specimen (intact = 100%).
Data Analysis
Statistical analysis was performed using IBM SPSS Statistics (v22, IBM Corp., Armonk, NY). Statistical analysis was performed, and ROM and IDP were compared across the proximal adjacent level (T9–T10), first instrumented level (T10–T11), and second instrumented level (T10–T11), and grouped by single- and multilevel tethering techniques. The Shapiro-Wilk test was used to assess normality across raw ROM and IDP datasets due to the small sample size (n = 7). Results of the Shapiro-Wilk test for normality did not find any construct, across ROM and IDP datasets, to violate the assumption of normality (P = .194–.961). Therefore, 1-way analysis of variance (ANOVA) with repeated measures and Tukey's post hoc analysis was used to determine significant differences in ROM and IDP between: (1) intact, rigid, SPT 1, SPT Helix 1, and SPT Trans-Helix 1 constructs; and (2) intact, rigid, SPT 2, SPT Helix 2, and SPT Trans-Helix 2 constructs. Lastly, a 1-way ANOVA with repeated measures and Tukey's post hoc analysis was used to determine the effect of tensioning or hand-tying the tethered construct on ROM and IDP by comparing the intact, rigid, and the single-level hand-tied helical construct (SPT Helix HT 1) and tensioned helical (SPT Helix 1) constructs. Statistical significance was defined as P ≤ .05.
RESULTS
Single-Level Tether Constructs
Adjacent Level (T9–T10)
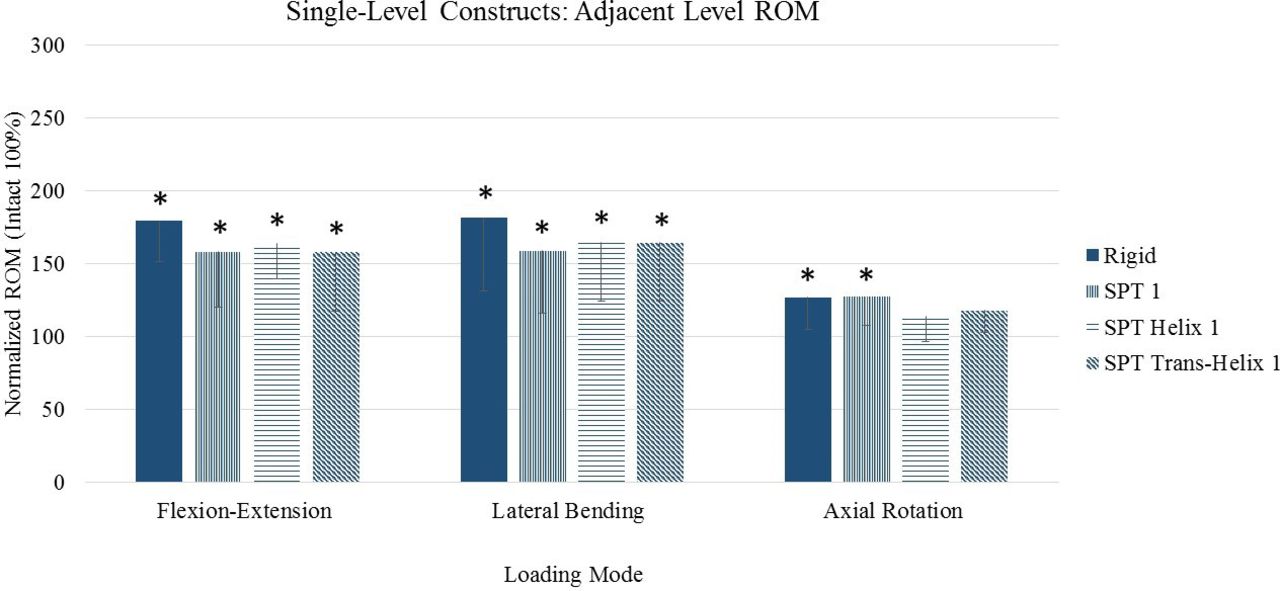
All single-level constructs (rigid, SPT 1, SPT Helix 1, and SPT Trans-Helix 1) significantly increased motion in FE and LB when compared to intact. In AR, only the rigid and SPT 1 constructs exhibited significant motion increases (P ≤ .05; Figure 3). Of IDP data recorded at the adjacent level, only the rigid construct significantly increased disc pressure compared to intact (Table 1).

Average range of motion in flexion-extension, lateral bending, and axial rotation for the adjacent level (T9–T10) for single-level constructs. All data were normalized to intact (100%). *P ≤ .05 versus intact.
Average intradiscal pressure (IDP) in flexion-extension for the adjacent level (T9–T10) and first instrumented level (T10–T11) for all constructs. All data are normalized to intact (100%). *P ≤ .05 versus intact.
First Instrumented Level (T10–T11)
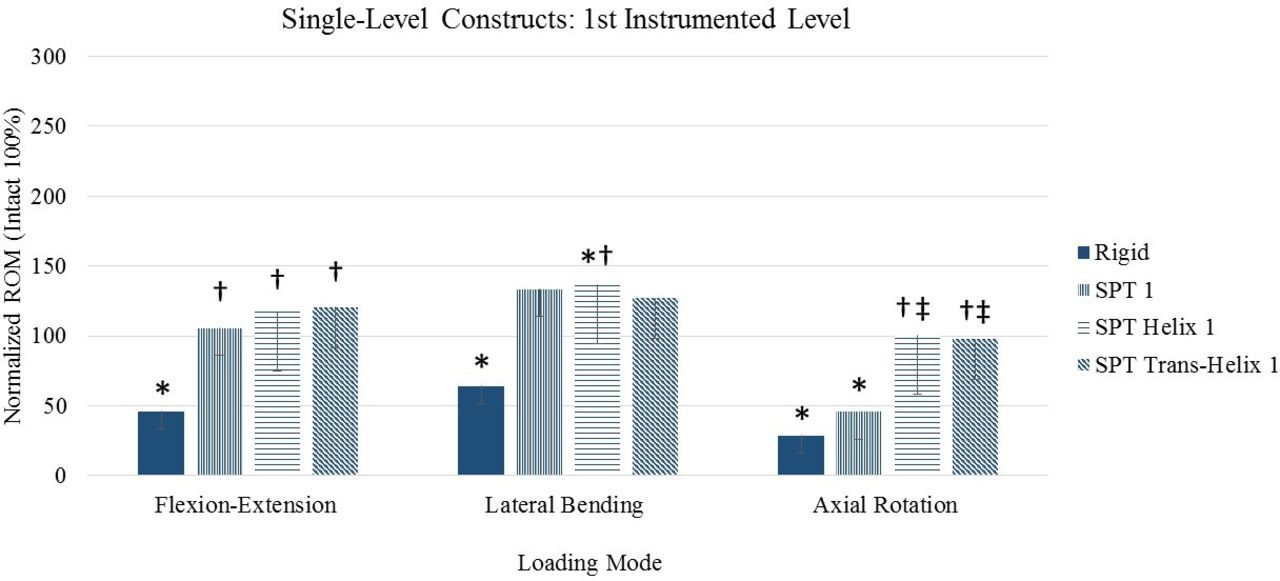
The rigid construct significantly reduced motion in comparison to intact in all loading modes (P ≤ .05). During FE, the SPT 1, SPT Helix 1, and SPT Trans-Helix 1 constructs exhibited significantly greater motion than the rigid construct (P ≤ .05) but showed no significant differences across groups (P > .05). Only the SPT Helix 1 construct demonstrated increased motion in LB in comparison to the rigid construct (P ≤ .05). During AR, the SPT 1 construct motion was significantly less than intact (P ≤ .05); motion of the SPT Helix 1 and SPT Trans-Helix 1 was similar to intact (P > .05) and significantly greater than rigid and SPT 1 (P ≤ .05; Figure 4). Analysis of IDP data at the first instrumented level found that only the SPT 1 construct significantly increased disc pressure versus the intact spine (P ≤ .05; Table 2).
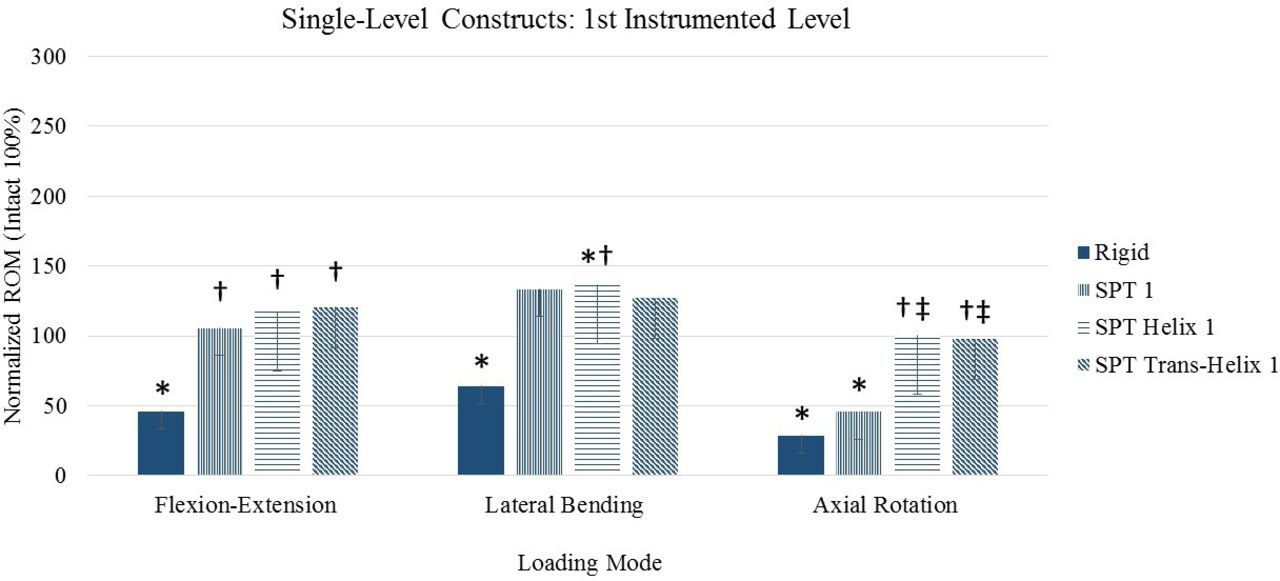
Average range of motion in flexion-extension, lateral bending, and axial rotation for the first instrumented level (T10–T11) for single-level constructs. All data are normalized to intact (100%). *P ≤ .05 versus intact; †P ≤ .05 versus rigid; ‡P ≤ .05 versus SPT 1.
Average range of motion in flexion-extension (FE), lateral bending (LB), and axial rotation (AR) for the second instrumented level (T11–T12) for all constructs. All data are normalized to intact (100%). *P ≤ .05 versus intact; †P ≤ .05 versus rigid; ‡P ≤ .05 versus SPT 2.
Second Instrumented Level (T11–T12)
Only the rigid construct showed a statistically significant change with a decrease in motion across all loading mechanisms versus the intact spine (P ≤ .05; Table 2).
Two-Level Tether Constructs
Adjacent Level (T9–T10)
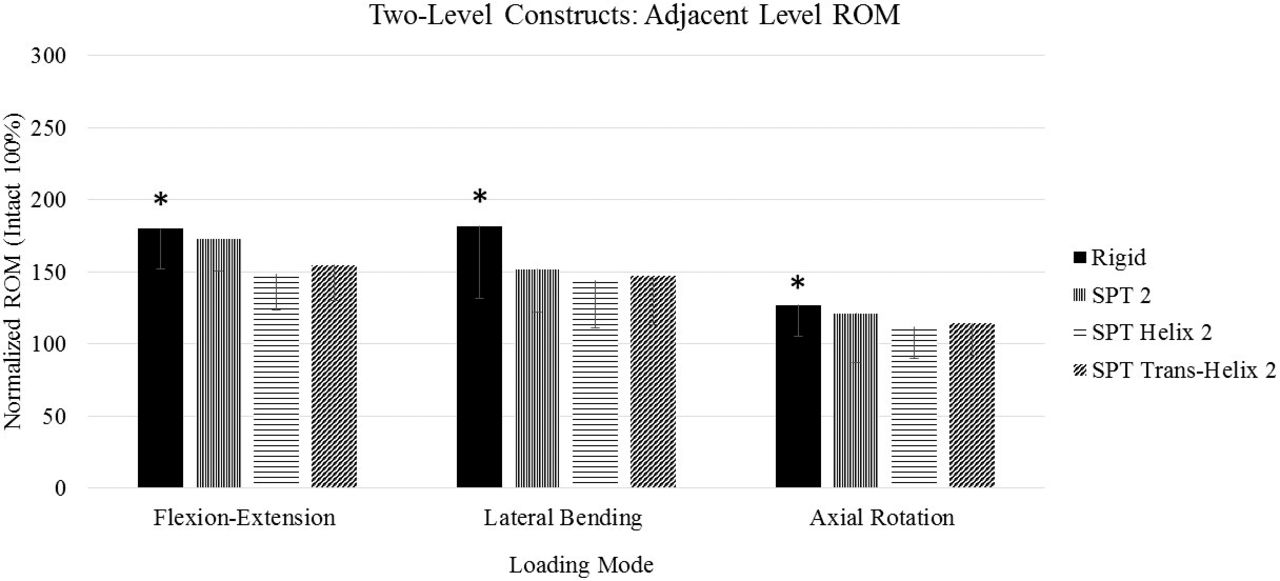
Two-level tether constructs showed no statistically significant change in motion in any loading mechanism at the adjacent level (P > .05; Figure 5). No significant differences in IDP were observed (Table 2).

Average range of motion in flexion-extension, lateral bending, and axial rotation for the adjacent level (T9–T10) for 2-level constructs. All data are normalized to intact (100%). *P ≤ .05 versus intact.
First Instrumented Level (T10–T11)
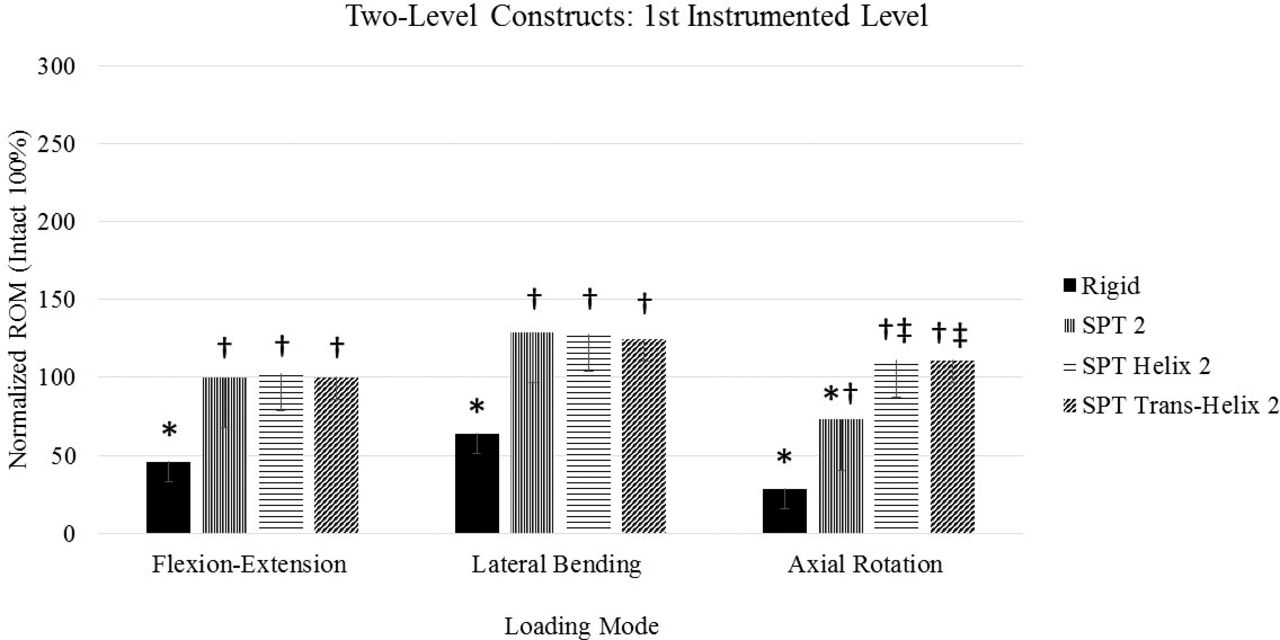
SPT 2 displayed increased motion in AR in comparison to the intact spine (P ≤ .05). The SPT 2, SPT Helix 2, and SPT Trans-Helix 2 constructs all exhibited increased motion in FE, LB, and AR in comparison to the rigid construct (P ≤ .05). Additionally, SPT Helix 2 and SPT Trans-Helix 2 had increased motion in AR in comparison to the SPT 2 configuration (P ≤ .05; Figure 6). FE IDP results revealed that the SPT 2 construct significantly increased pressure at the proximal instrumented level in comparison to intact (P ≤ .05; Table 2).

Average range of motion in flexion-extension, lateral bending, and axial rotation for the first instrumented level (T10–T11) for 2-level constructs. All data are normalized to intact (100%). *P ≤ .05 versus intact; †P ≤ .05 versus rigid; ‡P ≤ .05 versus SPT 2.
Second Instrumented Level (T11–T12)
SPT 2 had decreased motion in FE and AR in comparison to the intact spine (P ≤ .05). SPT 2, SPT Helix 2, and SPT Trans-Helix 2 displayed statistically significant increases in motion in FE and LB in comparison to the rigid construct (P ≤ .05). Lastly, SPT Helix 2 and SPT Trans-Helix 2 had increased FE motion in comparison to the SPT 2 construct (P ≤ .05; Table 1).
Hand-Tied Construct
Adjacent Level (T9–T10)
SPT Helix HT 1 exhibited increased motion in FE and LB at the adjacent level when compared to intact (P ≤ .05). No significant differences in IDP were observed (Table 2).
First Instrumented Level (T10–T11)
SPT Helix HT 1 increased motion in FE and LB in comparison to both the intact and rigid constructs (P ≤ .05), while increased motion in AR was only seen when compared to the rigid construct (P ≤ .05). FE IDP for the SPT Helix HT 1 construct was largest in magnitude and was significantly greater than the intact construct at the first instrumented level (P ≤ .05; Table 2).
Second Instrumented Level (T11–T12)
There was no statistical difference in motion for any of the 3 loading modes at the second instrumented level (Table 3).
Average range of motion in flexion-extension (FE), lateral bending (LB), and axial rotation (AR) for the adjacent, first instrumented, and second instrumented levels for the hand-tied versus clamp single-level constructs. All data are normalized to intact (100%). *P ≤ .05 versus intact; †P ≤ .05 versus rigid; ‡P ≤ .05 versus SPT 1.
DISCUSSION
PJK is a common postoperative complication after adult spinal deformity (ASD) corrective surgery, with rates as high as 39%.4 PJF occurs between 1.4% and 35%;7 if failure does occur, as many as 47.4% of cases require revision surgery.27 While failure modes for PJK are multifactorial, it is suggested that the abrupt transition from rigid pedicle screw fixation to the relatively hypermobile noninstrumented segments increases stress on the intervertebral discs.1,28 Consequently, posterior sublaminar tethering has been proposed to reduce the rigidity of the upper instrumented construct, in an attempt to reduce construct rigidity at the upper levels and thus minimize risk of PJK. Retrospective analysis of 625 ASD patients by Line et al29 found that prophylactic use of posterior tethering reduced rates of PJK by 20.7% compared to patients with only pedicle screws and rods (16.1% versus 20.3%, respectively); revision surgery for PJF was reduced by 61.9% (3.2% versus 8.4%). Nevertheless, a narrow spinal canal or risk for neurological damage may be a contraindication for sublaminar tethering. Alternatively, we propose prophylactic SPT techniques and characterize the techniques compared to rigid and traditional sublaminar tethering reconstruction.
Results from the present study found that rigid construct consistently showed a significant reduction in motion across instrumented levels in every loading mode. At the adjacent level, FE IDP and average ROM were 258% and 163%, respectively, in comparison to intact, reflecting the sudden transition from a stiff motion segment to an adjacent hypermobile motion segment at the proximal end of the construct. This combination of loads within the thoracic spine may be a risk factor for PJK.
Alternatively, the 1- and 2-level SPT Helix and SPT Trans-Helix constructs showed similar biomechanical effects across instrumented and adjacent levels. Investigators noted no significant difference in ROM or IDP when the tether was tensioned through the T9–T10 interspinous ligament or at the T10 SP. Contrary to SPT Helix and SPT Trans-Helix constructs, which require only 1 clamp and tensioning step, SPT 1 and SPT 2 constructs necessitate 2 and 4 clamps, respectively. Furthermore, clamps were placed perpendicular to the SP and in the AR plane of motion. This may explain why, during AR, SPT 1 and SPT 2 constructs showed motion trends similar to rigid constructs.
Comparisons of the tensioned and hand-tied single-level SPT Helix constructs found no significant differences in ROM and IDP between the hand-tied construct and the tensioned construct; however, the hand-tied construct did show a trend towards increased motion and pressure at the first instrumented level. This implies that, by altering tension on the tether, the surgeon may change the stiffness of the construct. However, the hand-tie technique may present the risk of intraoperative loosening of the knot over time.
There are some limitations to this study. As this was an in vitro study, it is difficult to draw conclusions about the effect of SPT in a clinical situation where bony fusion would be expected after surgery. Therefore, the authors cannot comment on how any of these configurations may alter the rate of fusion and pseudarthrosis. Also, the IDP sensors used in this study were designed to measure forces within a hydrostatic environment and are calibrated in a vacuum. Researchers inserted sensors into the T9–T10 and T10–T11 disc spaces with the goal of placement inside the nucleus pulposus with consistent alignment from specimen to specimen. Misalignment of the sensor, degeneration of the disc, and the presence of shear forces may contribute to large standard deviations within the data.30–33 Lastly, the scope of the present study was limited to include only primary rotations in FE, LB, and AR. It should be noted that coupled motion does occur in the thoracolumbar spine,34 and future investigation should elucidate the effect of the proposed techniques on off-axis rotations.
CONCLUSIONS
Results of the current study suggest that SPT provides a gradual transfer of motion and pressure from instrumented to uninstrumented levels at the proximal end of a rigid construct. SPT constructs produced increased motion at the first instrumented level and decreased motion at the adjacent level when compared to a completely rigid construct. Hand-tying of the tether essentially allows for adjustments to the construct tension to permit more motion than would be allotted by a tensioning and clamping system but may loosen over time. These in vitro biomechanical results suggest that a new posterior fixation technique may ultimately lead to decreased risk of PJK and other complications in thoracolumbar spine fusion patients. Further studies are necessary to determine the clinical outcomes of these tethering configurations.
Footnotes
Disclosures and COI: Authors VP, DO, and NW have no financial relationships to disclose. Study costs were allocated within the research budget of Globus Medical, Inc., at which MM, DMB, MT, EAM, and BSB are salaried employees.
- This manuscript is generously published free of charge by ISASS, the International Society for the Advancement of Spine Surgery. Copyright © 2020 ISASS.
REFERENCES
In this issue




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}