


Abstract
Background Spinal surgical robots are in the early phases of development and adoption. These systems need to be easier to use, less costly, and more workflow-efficient.
Methods A portable, operating room table-mounted spine robot and camera system are described. Accuracy and workflow efficiency were assessed in comparison to another commonly utilized spinal robotic system.
Results For the surgical task of inserting 4 pedicle screws into 2 adjacent lumbar vertebrae, equivalent accuracy was seen with both systems. The new robotic system was more efficient in terms of total procedure time, system setup time, and screw planning to in-position time (p<0.05).
Conclusions Spinal robotic systems can be more efficient and less expensive while maintaining accuracy.
Clinical Relevance Spinal robots are being increasingly utilized in clinical practice. Lowering the cost of these systems and increasing their workflow efficiency should help patients and spine surgeons alike.
Even as technology advances in spine care, there is a need to balance innovation with efficiency, cost, and patient outcomes. Current robotically assisted navigation systems for spinal pedicle screw placement are associated with a significant increase in radiation exposure to the patient and reduced workflow efficiency compared with freehand screw placement techniques.1,2 Contemporary literature reports that patients with pedicle screws placed using 3-dimensional (3D) navigational guidance experience 8.7 times more radiation exposure as compared with surgeons who leave the operating room (OR) during image acquisition.2 Furthermore, the additional time needed for image acquisition, creation of plans for pedicle screw placement, and positioning of robotic systems is associated with prolonged operative time, consequently increasing the cost of care.1,3 It is estimated that the cost for each OR minute may range from $7 to more than $100.3 On the other hand, fluoroscopy-guided “freehand” techniques are associated with reduced screw placement accuracy and increased radiation exposure for surgeons and the OR team.4 Taking into consideration these factors, the need to develop innovative navigation systems that are cost-effective, efficient, and minimize risks to the patient and the surgical team has driven the development of a robot-enabled, minimally invasive navigation system (Accelus, Palm Beach Gardens, Florida). In 2021, the US Food and Drug Administration (FDA) granted this system approval for its 3D navigation application. Ongoing developments include navigating the robot with a standard C-arm fluoroscope, thus further reducing cost, radiation exposure to the patient and the OR team, and increasing efficiency.
Spinal robotics is still in an early phase of technology adoption. When examining the greatest impediments to more widespread use of these systems, it is apparent that they must improve in several ways. In particular, operative workflow should be more efficient and system costs should be reduced while maintaining accuracy and reducing radiation exposure.
WORKFLOW EFFICIENCY
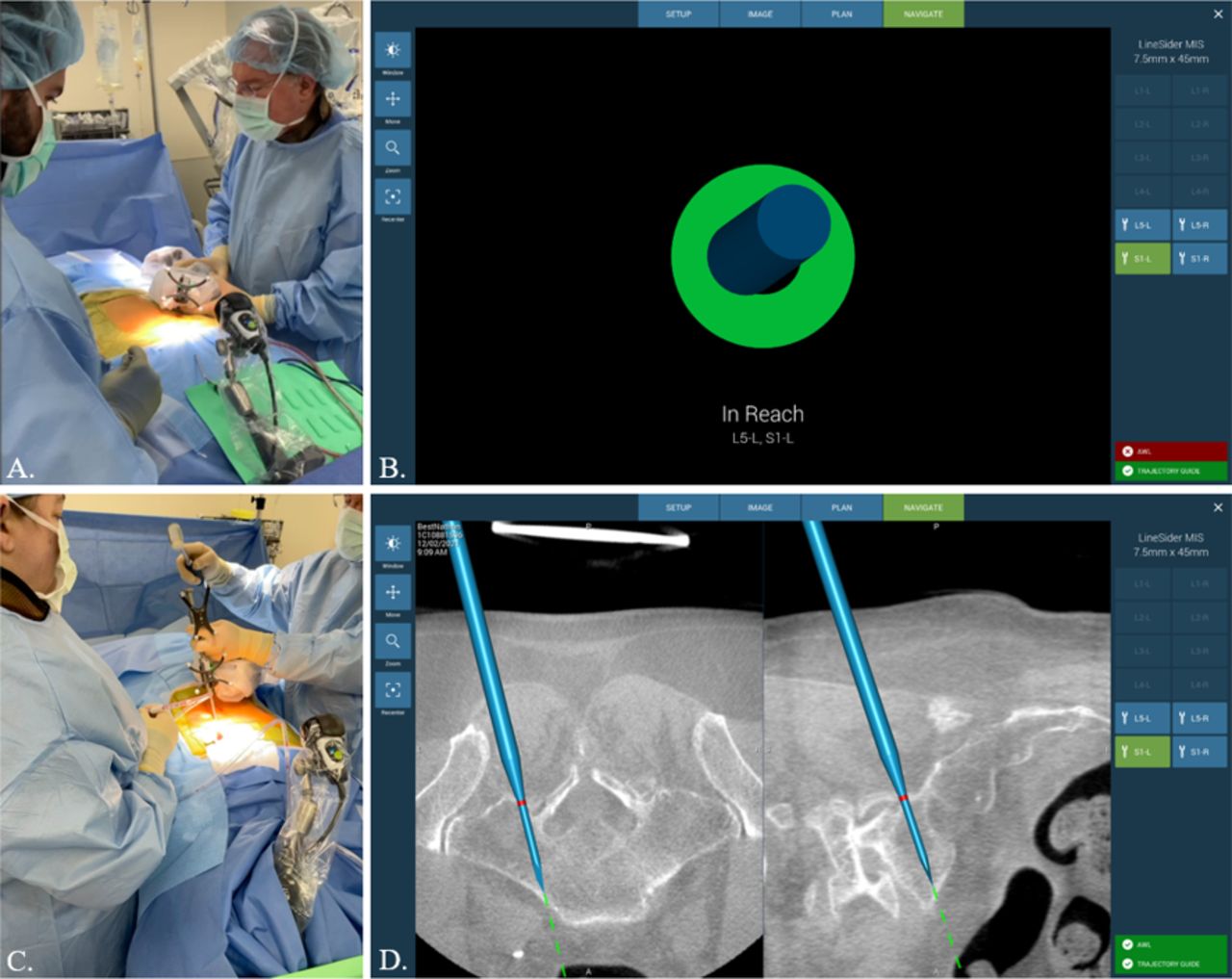
The robot-enabled, minimally invasive navigation system’s workflow is surgeon-centric. The system’s software anticipates the surgeon’s subsequent actions to enhance ease of use. This can be demonstrated, for example, when examining the use of the robot for a posterior lumbar fusion. In this example, the patient is positioned prone on a Jackson table. This is followed by mounting the robot and navigation camera to the OR table. Typically, the robot is mounted on the surgeon’s side of the table just below the patient’s axilla; the camera is mounted on the opposite side of the OR table at the patient’s midthigh level and positioned so that the camera view is directed cranially and along the patient’s midline (Figure 1). The camera, which is small and unobtrusive, can remain in the field throughout the procedure even if the surgeon is finished using the robot (it can be used for subsequent navigation, if desired). Advantages of this camera are that it has a fish eye view of the entire surgical field, a wide-angle camera lens, and is small enough to be positioned just above the patient and adjacent to the surgical field. This positioning allows the surgical team to freely stand and move around the OR table without interfering with the camera’s line of sight. The surgeon has the option of navigation using either 3D imaging (eg, with an O-arm—currently FDA-approved) or multiplanar (eg, anteroposterior and lateral) 2D imaging (with a C-arm fluoroscope—pending FDA approval). The images are imported into the system and automatically registered to the surgical anatomy. Screw trajectory planning is quick and efficient using icons that are dragged into position on the touch screen computer. The surgeon can then rapidly position the robot manually with the assistance of the navigation system, followed by fixing the robot near the target. The robot then navigates to the planned screw trajectory with the push of a button. Next, screw placement is carried out in standard fashion using the robot and the integrated image guidance software (Figure 2A, B, C and D). The entire process is simple and efficient.

Operating room (OR) setup. The robot is mounted on the surgeon’s side of the table just below the patient’s axilla, and the camera is mounted on the opposite side of the OR table at the patient’s midthigh level and positioned so that the camera view is directed cranially and along the patient’s midline.
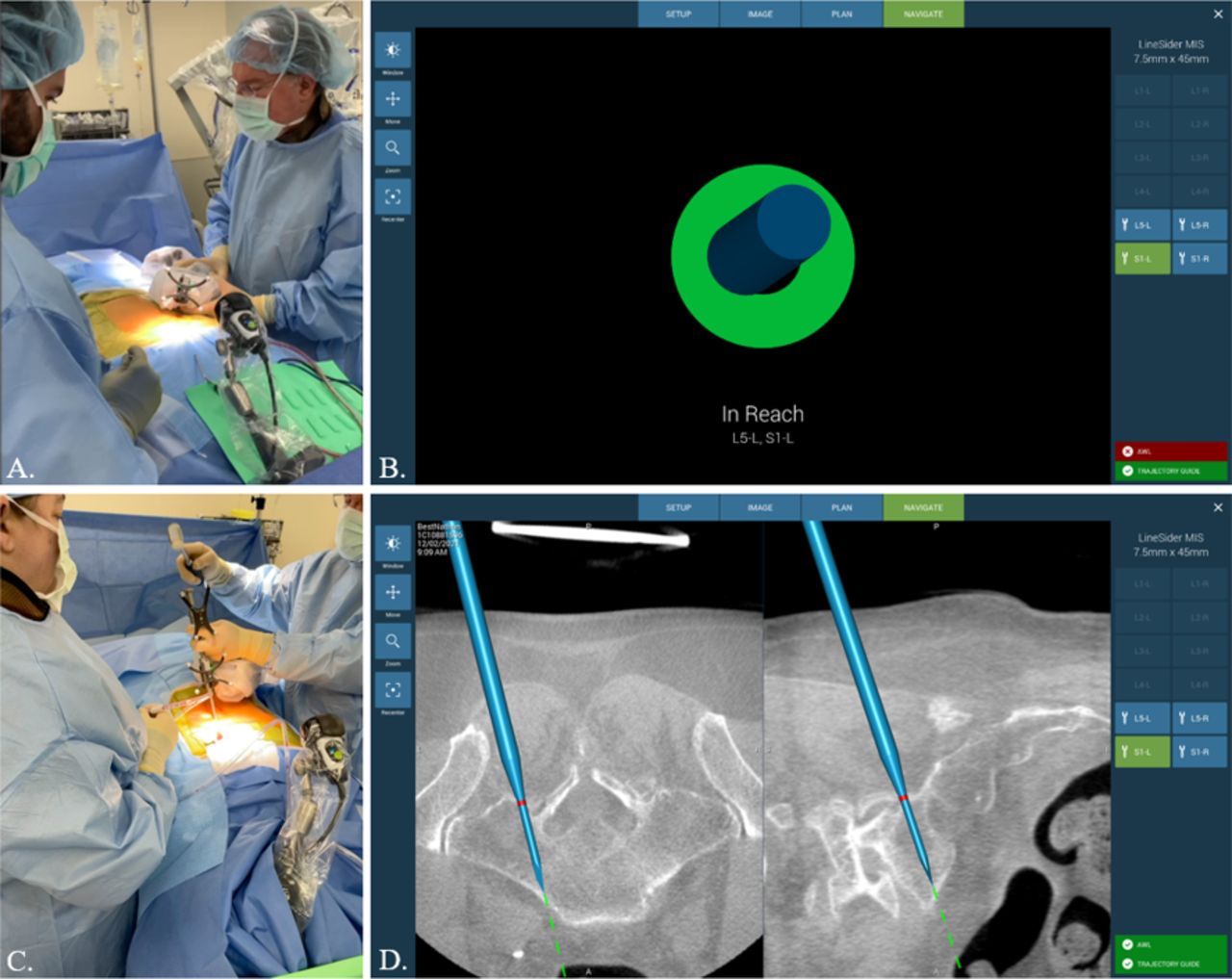
Surgical workflow. The surgeon manually positions the robot (A) with the assistance of the navigation system (B). Screw placement is carried out in standard fashion using the robot (C) and the integrated image guidance software (D).
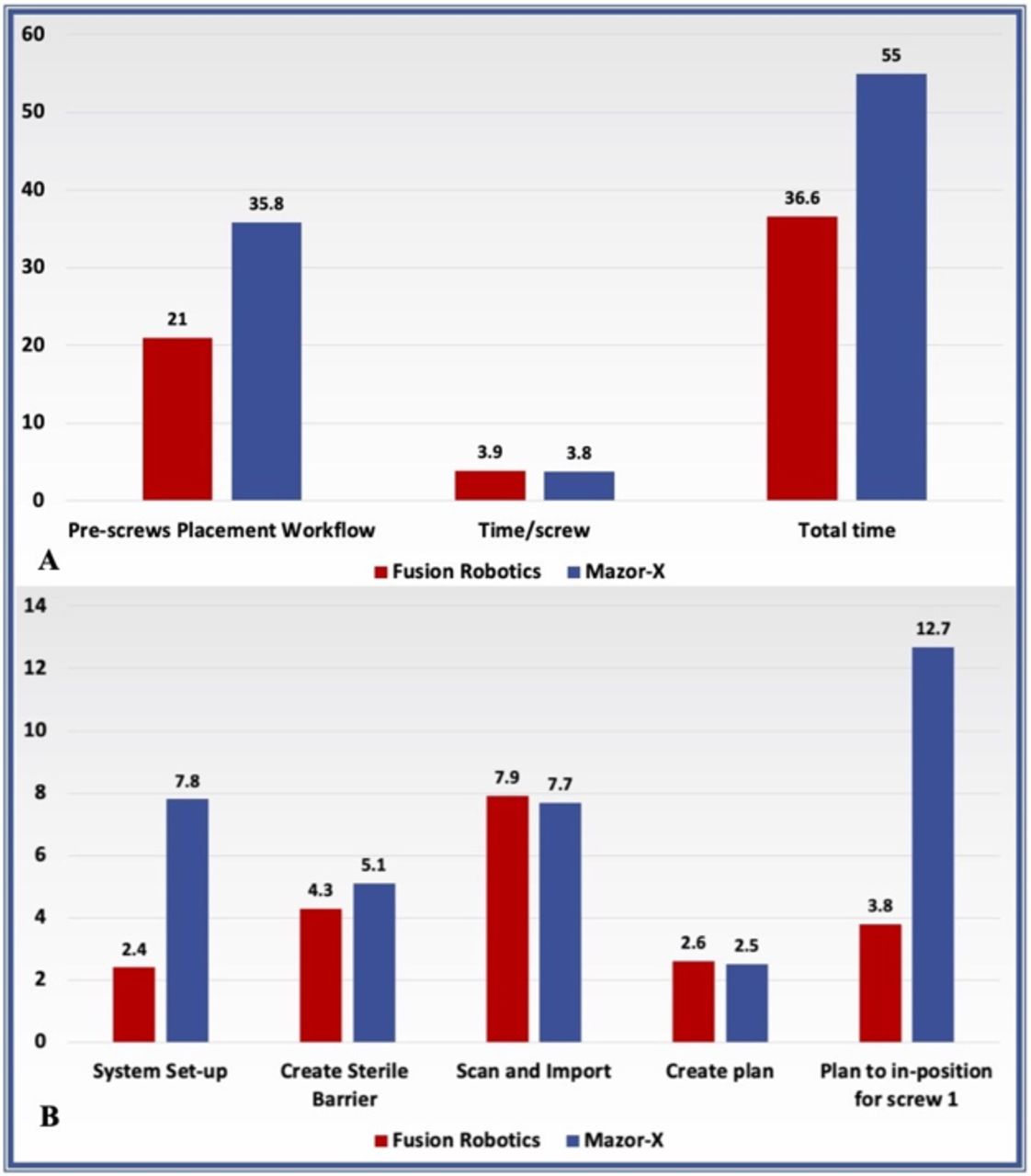
A previous study compared the workflow efficiency of inserting 4 pedicle screws into 2 adjacent lumbar vertebrae using this new robotic 3D navigation system (formerly Fusion Robotics) with the Mazor-X Stealth Edition spine robot (Medtronic, Dublin, Ireland).5 The study showed that, while both systems were accurate, the new robotic navigation system had significantly better workflow efficiency measurements (total procedure time, system setup time, and screw planning to in-position time) than did the Mazor-X Stealth Edition (Figure 3 and Table).5
Operative workflow efficiency (duration) in min.5
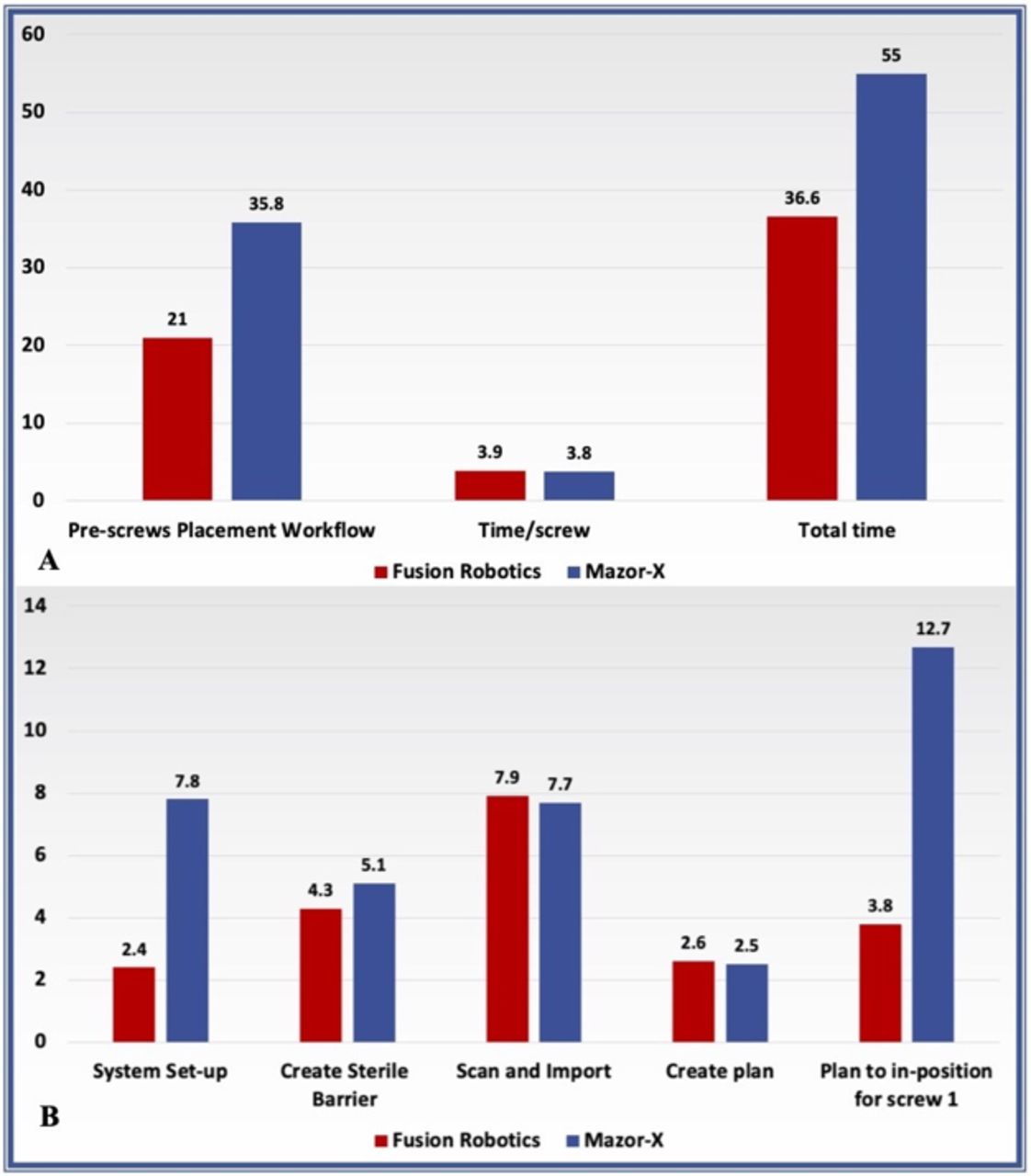
Bar charts comparing the operative workflow efficiency (duration in min) for both groups. (A) Mean duration of the preplacement of the screws, screws’ placement, and total procedure. (B) Mean duration of the system setup, creating a sterile barrier, scanning and importing images, creating a plan, plan to in-position of the first screw.5
RADIATION EXPOSURE
An abstract presented at the Scoliosis Research Society reported an estimated 18-fold increase in the risk of thyroid cancer among its surveyed members compared with the general population.6 There are 3 primary radiation sources in the OR: direct radiation, leakage radiation, and scattered radiation.7,8 Direct radiation is a high-dose radiation emitted from the primary x-ray source toward the image intensifier to produce the images.7,8 Patients’ torsos and surgeons’ dominant hands on the ipsilateral side of the primary source are routinely affected by direct radiation during fluoroscopically assisted “freehand” pedicle screw placement. Compton scatter results in additional radiation exposure to the surgeon during these procedures.8 As currently FDA-cleared, the robot-enabled, minimally invasive navigation system utilizes 3D image acquisition (such as with an O-arm) carried out when the surgical team is at a distance from the imaging device (even outside the OR). Consequently, significant radiation is delivered to the patient, comparable with what occurs with the alternative commercially available spine robotic navigation systems. To help address this issue, we have integrated multiplanar, virtual 2D navigation with the new robotic system. This not only further lowers costs, it also enables the system to be utilized in surgery centers with existing C-arm fluoroscopes and lowers radiation exposure not only to the surgical team, but also to the patient. We will publish additional data regarding this application in the near future.
ACCURACY
The robot-enabled, minimally invasive navigation system has been tested using a comprehensive array of qualitative and quantitative studies to validate its accuracy and clinical usability. This testing has demonstrated submillimetric accuracy compared with ground truth, which is greater accuracy than the FDA requires for approval. In part, this accuracy is attributable to the fact that the camera is fixed to the OR table, moves in synchrony with the table, and is relatively close to the surgical field.
On the contrary, other robotic (and nonrobotic) navigation systems may encounter the phenomenon, which has been termed, “the silent loss of navigational accuracy.” This occurs because a digitizing camera, typically remote from the surgical field, may move relative to the OR table after registration. Even in the presence of a dynamic reference array (which is supposed to compensate for this motion), the incident angle of light projected from the camera and reflected from the array can change, producing a navigation error.9 In a prior study comparing the new robotic 3D navigation system with the Mazor-X Stealth Edition, equivalent accuracy was demonstrated for both systems for the placement of lumbar pedicle screws (100% accuracy for each system).5
CURRENT SITUATION
There are 3 primary types of robotic navigation control systems generally used in surgeries: (1) the supervisory-controlled system, where the robot autonomously performs the surgery under the surgeon’s supervision following a preplan; (2) telesurgical interaction (eg, the da Vinci surgical system), where the surgery is done by a robot that is controlled by the surgeon remotely; and (3) the shared control system, where the surgery is simultaneously done by the surgeon and the robot.10 All of the current spinal robotic navigation systems are shared control robots.10 In contrast, the robot-enabled, minimally invasive navigation system utilizes a hybrid system, which includes a blend between the telesurgical interaction system and the shared control system. This hybrid approach offers the surgeon the freedom to manually control the robotic arm, increasing the range of motion that can be achieved as well as utilizing this enabling technology for single-position surgeries.10 It also provides greater tactile feedback to the surgeon and the ability for the surgeon to adjust a trajectory manually (eg, if skiving is suspected or detected). Furthermore, other alternative leading robotic navigation systems approved for use in spinal procedures are large, complex, and costly. The new robotic navigation system offers a simple, compact, and economical alternative. It has been specifically designed to improve surgical workflow and increase operative efficiency. Its compact design is optimized for daily use and cost-effectiveness without compromising accuracy, at nearly one-quarter to one-third of the market price of the current robotic systems.
FUTURE DIRECTIONS
In 2022, developments are underway to gain FDA approval for the commercialization of the new robotic system with multiplanar, 2D image guidance. It is believed that this combination will provide better workflow than current robot-assisted, 3D-guided navigation systems while reducing radiation exposure and screw misplacement compared with traditional freehand screw insertion. Furthermore, future projects include the use of the robot-enabled, minimally invasive navigation system for planning rod placement, performing single-position procedures (eg, lateral and oblique interbody procedures with posterior screw placement), cervical procedures, and interbody procedures. In addition, we are working to prove that there is no need for dynamic referencing with the system, given the ability to fix the patient and the camera to the OR table (potentially eliminating the need for an iliac Schanz pin). We are also developing real-time navigation software and a motorized robot arm lock.
Footnotes
Funding The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of Conflicting Interests Dr. Pollina has the following disclosures: Alphatec Spine: consultant, advisory board member; Medtronic: consultant, advisory board member. Dr. Poelstra has the following disclosures: Acuity Surgical: consultant; Atlas Spine: consultant; Innovative Surgical Devices: consultant; Flowpharma: distribution group; Kuros: research support; Inion OI: royalties; Stryker: royalties; Camber Spine: scientific advisory board; Society of Minimally Invasive Spine Surgery: scientific advisory board; Medtronic: speaking/teaching arrangements; North American Spine Society: research grant. Dr. Chaudhary has the following disclosures: Omega Fellowship: educational grant; Globus Fellowship: educational grant; Stryker: consultant; Innovative Surgical Design: consultant; Globus: honorarium; Stryker: speaker; North American Spine Society: committee role; American Academy of Orthopedic Surgeons: committee role. Dr. Foley: consultant for Medtronic; direct stock ownership in Accelus, Companion Spine, Discgenics, DuraStat, Medtronic, NuVasive, Practical Navigation, RevBio, Spine Wave, Tissue Differentiation Intelligence, Triad Life Sciences, and True Digital Surgery; patent holder with Medtronic and NuVasive; royalties from Medtronic; and board of directors of Discgenics, DuraStat, RevBio, Tissue Differentiation Intelligence, Triad Life Sciences, and True Digital Surgery. All other authors have no personal, financial, or institutional interest in the materials or devices described in this manuscript.
Ethical Considerations Because this work did not involve human interaction, an institutional board review was deemed unnecessary. No patient data were collected, so patient consent was not required.
Author Contributions Conception and design: Foley, Soliman; Drafting the manuscript: Foley, Soliman; Critically revising the manuscript: All authors; Reviewed submitted version of manuscript: All authors; Statistical analysis: N/A; Study supervision: Foley, Chaudhary, Poelstra, Pollina.
- This manuscript is generously published free of charge by ISASS, the International Society for the Advancement of Spine Surgery. Copyright © 2022 ISASS. To see more or order reprints or permissions, see http://ijssurgery.com.
In this issue




{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.