


Abstract
Background Because 3-dimensional computed tomography and magnetic resonance imaging analysis of the spinal architecture is done with the patient in the supine position, stereoradiography may be more clinically relevant for the measurement of the relative displacements of the cervical vertebrae in vivo in the upright position. The innovative EOS stereoradiography system was used for measuring the relative angular displacements of the cervical vertebrae in a limited population to determine its feasibility. The precision and accuracy of the method were investigated.
Methods In 9 patients with 16 Mobi-C prostheses (LDR Medical, Troyes, France) and 12 healthy subjects, EOS stereoradiography of the lower cervical spine (C3-7) was performed in the neutral upright position of the neck, flexion, extension, left and right lateral bending, and left and right axial rotation. The angular displacements were measured from the neutral position to every other posture. The random error was studied in terms of reproducibility. In addition, an in vitro protocol was performed in 6 specimens to investigate accuracy.
Results The reproducibility and the accuracy variables varied similarly between 1.2° and 3.2° depending on the axis and direction of rotation under consideration. The Mobi-C group showed less mobility than the control group, whereas the pattern of coupling was similar.
Conclusions Overall, the feasibility of dynamic EOS stereoradiography was shown. The prosthesis replicates the pattern of motion of the normal cervical spine.
With the development of nonfusion procedures for the surgical treatment of selected spinal disorders, interest is growing regarding the measurement of the 3-dimensional (3D) spinal kinematics at the segmental level in vivo.
Because flexion-extension motion is uniplanar, sagittal kinematics is easily accessible by use of standard lateral radiographs. The flexion-extension range of motion and center of rotation in the normal population have been studied by several authors.1–4 The sagittal kinematics after total disc replacement at the cervical spine has been reported regarding the Bryan (Medtronic, Minneapolis, Minnesota), Frenchay (Medtronic), Prodisc-C (Synthes, West Chester, Pennsylvania), and Prestige II (Medtronic) prostheses.5–10 We recently used Spineview software (Surgiview, Paris, France) for this purpose in the case of 2 types of ball-andsocket cervical total disc replacement: Prestige LP (Medtronic) and Prodisc-C (Synthes).11
However, the investigation of kinematics of the cervical spine should not be limited to flexion-extension of the neck, and 3D analysis is required. The reciprocal coupling pattern between lateral bending and axial torsion is a limitation for using standard radiographs only in the 3D space.12, 13 Therefore studying the movements of lateral bending and axial torsion requires a computed tomography scan,14 magnetic resonance imaging,15 or stereoradiography protocols. For now, stereoradiography is the only method that allows investigation of the in vivo biomechanics of the spine in functional upright positions.
The innovative EOS stereoradiography system has been developed in collaboration among our institution, the Laboratoire de recherche en imagerie et orthopédie (LIO) (Montreal, Quebec, Canada), Saint-Vincent de Paul Hospital (Paris, France), and Biospace Med (Paris, France).16 We recently demonstrated the reliability of the EOS stereoradiography system for measuring the position and the orientation of the lower cervical vertebrae (C3-7) in neutral position in vivo.17 In this study the 95% confidence intervals for the linear and angular positions of a vertebra in the 3D space were 0.8 mm, 1.4 mm, and 0.6 mm along the sagittal, frontal, and axial axes, respectively, and 2.5°, 2.3°, and 3.2° for the respective rotations.
In the current study we investigated the feasibility of using the EOS system for the assessment of the 3D angular intervertebral kinematics in flexion-extension, lateral bending, and axial rotation at the cervical spine in the case of the Mobi-C prosthesis (LDR Medical, Troyes, France), and in a control healthy population. Additional in vitro testing aimed at characterizing the accuracy of the measurements with the current version of the EOS system.
Methods
Population
We enrolled 9 patients with 16 implanted Mobi-C cervical disc prostheses in the study. There were 6 women and 3 men aged 28 to 61 years (mean, 49 years). The level of implantation was C4-5 in 3 cases, C5-6 in 7, and C6-7 in 6. Seven cases involved a single level, whereas the replacement concerned 2 consecutive levels in 3 cases and 3 consecutive levels in 3 cases. In 1 case the prosthesis was placed above a former cervical arthrodesis. At the time of the study, the follow-up was 3 to 41 months (mean, 24 months). The Mobi-C prosthesis is a 3-piece implant with 2 metal endplates and a polyethylene mobile nucleus (Fig. 1). This implant has 2 bearing surfaces and achieves 5 degrees of freedom.

Mobi-C prosthesis. This implant has 5 degrees of freedom.
Twelve healthy volunteers aged 21 to 23 years with no medical history regarding the cervical spine were enrolled in the control group. There were 4 men and 8 women.
All the procedures using radiographic imaging were approved by the local ethical committee.
Acquisition protocol
For the acquisition, the subject was placed in the sitting position. The neutral position of the neck was defined as the natural position of the head when looking forward. Then, the subject was asked to close the eyes and to place the head as naturally as possible in flexion, extension, right axial torsion, left axial torsion, right lateral bending, and left lateral bending. The acquisition cycle was preceded by a warm-up cycle.
Imaging, vertebral reconstruction, and local vertebral screw frame
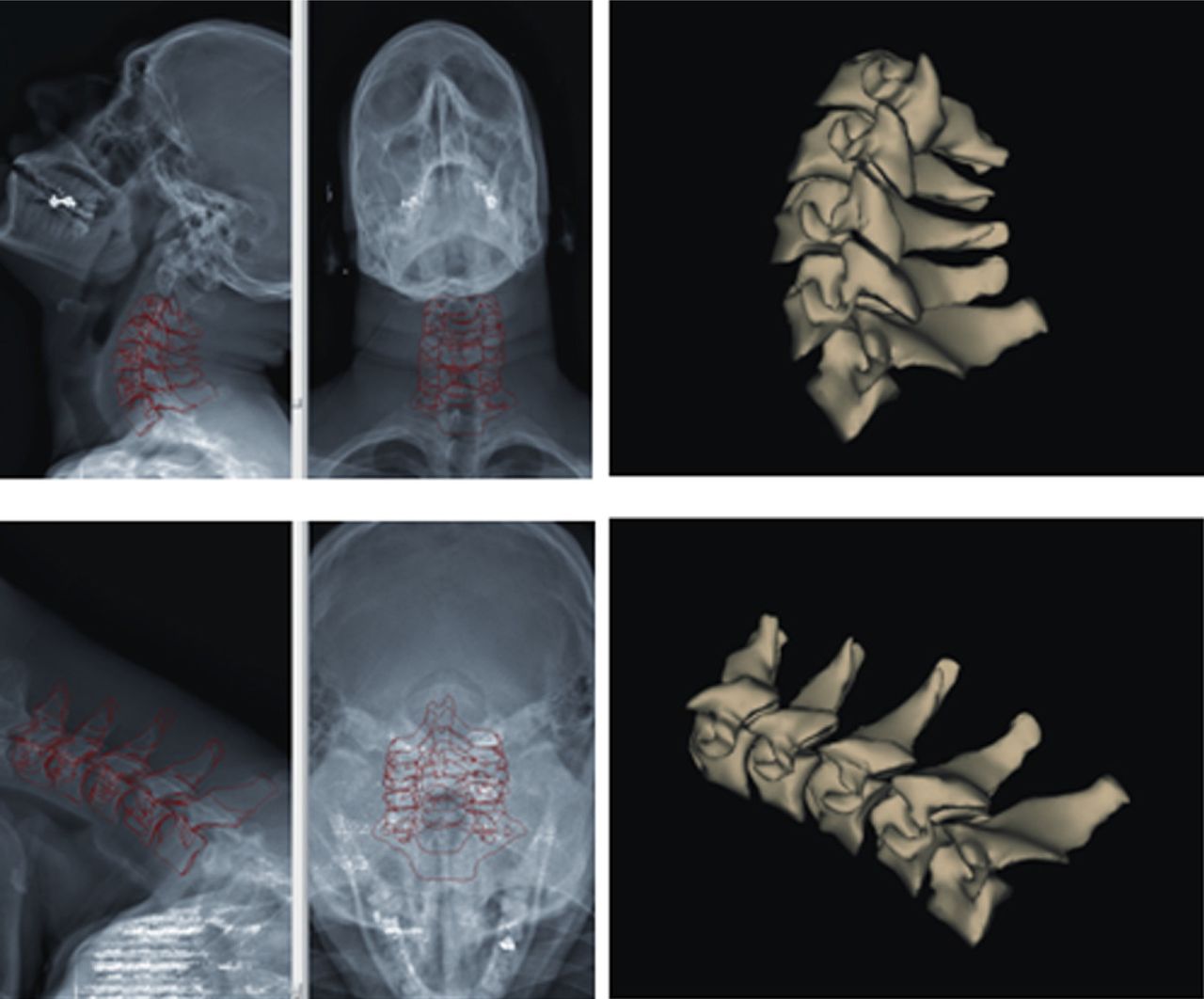
The method for obtaining the 6 coordinates of a lower cervical vertebra from the EOS system has been described previously.17 In brief, we used specific software based on non-stereo correspondence providing a 3D virtual reconstruction of the vertebra from the couple of simultaneous biplanar low-dose, high-definition radiographs. The virtual envelope of the C3-7 vertebrae was reconstructed in the neutral upright position of the neck. Those vertebral reconstructions were imported into the other pairs of radiographs and manually reoriented to match the radiologic lines in each of the 6 postures as defined previously (Fig. 2). In addition, in case of prosthesis, the 3D envelop of the implants (ie, superior and inferior endplates) was imported into each pair of radiographs, manually reoriented. All reconstructions were done twice.

Example of cervical spine stereoradiography using the EOS system in flexion-extension in vivo.
Variables and statistics
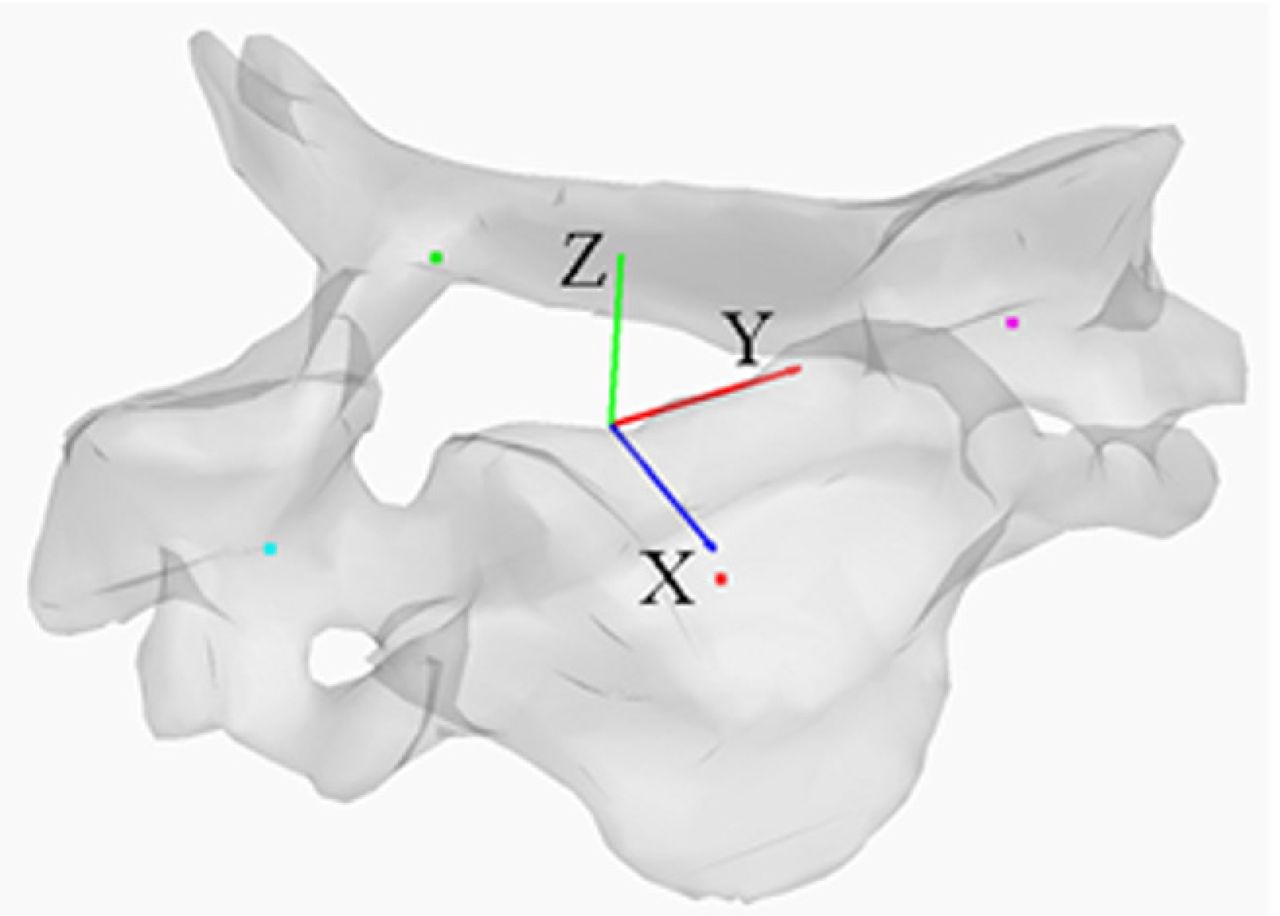
The angular displacement of each vertebral object from the neutral posture to any of the 6 other postures of the neck was calculated by use of the X-Y′-Z″ sequence of mobile axis (Bryant sequence). In the control group (n = 12 subjects × 4 levels = 48 sets of data), the local orthonormal screw frames were attached to the reconstructed vertebrae by use of the 4-barycenter method as proposed before (Fig. 3).17 In the prosthesis group (n = 16 instrumented levels), the local orthonormal screw frames were attached to the endplates because the reproducibility was better with use of the endplates as markers of known shape.
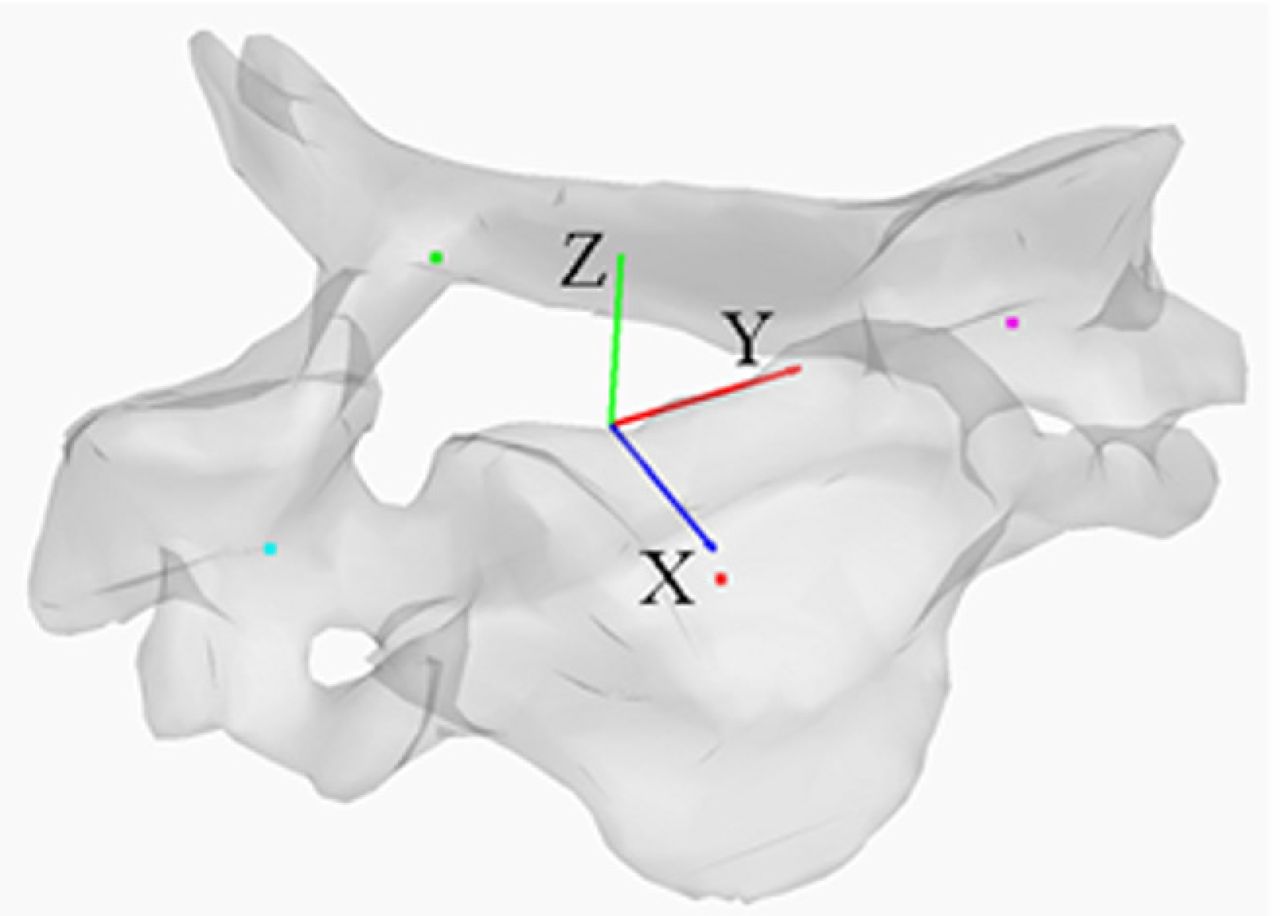
Example of reconstructed vertebra (C5) showing the local screw frame based on the 4 barycenters of the 4 anatomic regions (anterior, posterior, left, and right).
SPSS software (SPSS, Chicago, Illinois) was used for statistical analysis. Student's tests were used for comparisons (significance set at P >.05).
Complementary studies
Random error study
The random errors of the measurements were investigated in terms of reproducibility of the measurement of the angular displacement between 2 consecutive postures of the neck. This was done separately in the control group and the prosthesis group, with use of the vertebral objects and the prosthetic objects, respectively. The variable for reproducibility was defined as the difference between each of the 2 measured displacements and their mean. The standard deviation of the reproducibility variable was reported for X, Y′, and Z″ for each direction in each group. The variable for the control group had 96 values (4 levels × 12 subjects × 2 measurements), and there were 32 values for the prosthesis group (16 levels × 2 measurements).
Systematic error study
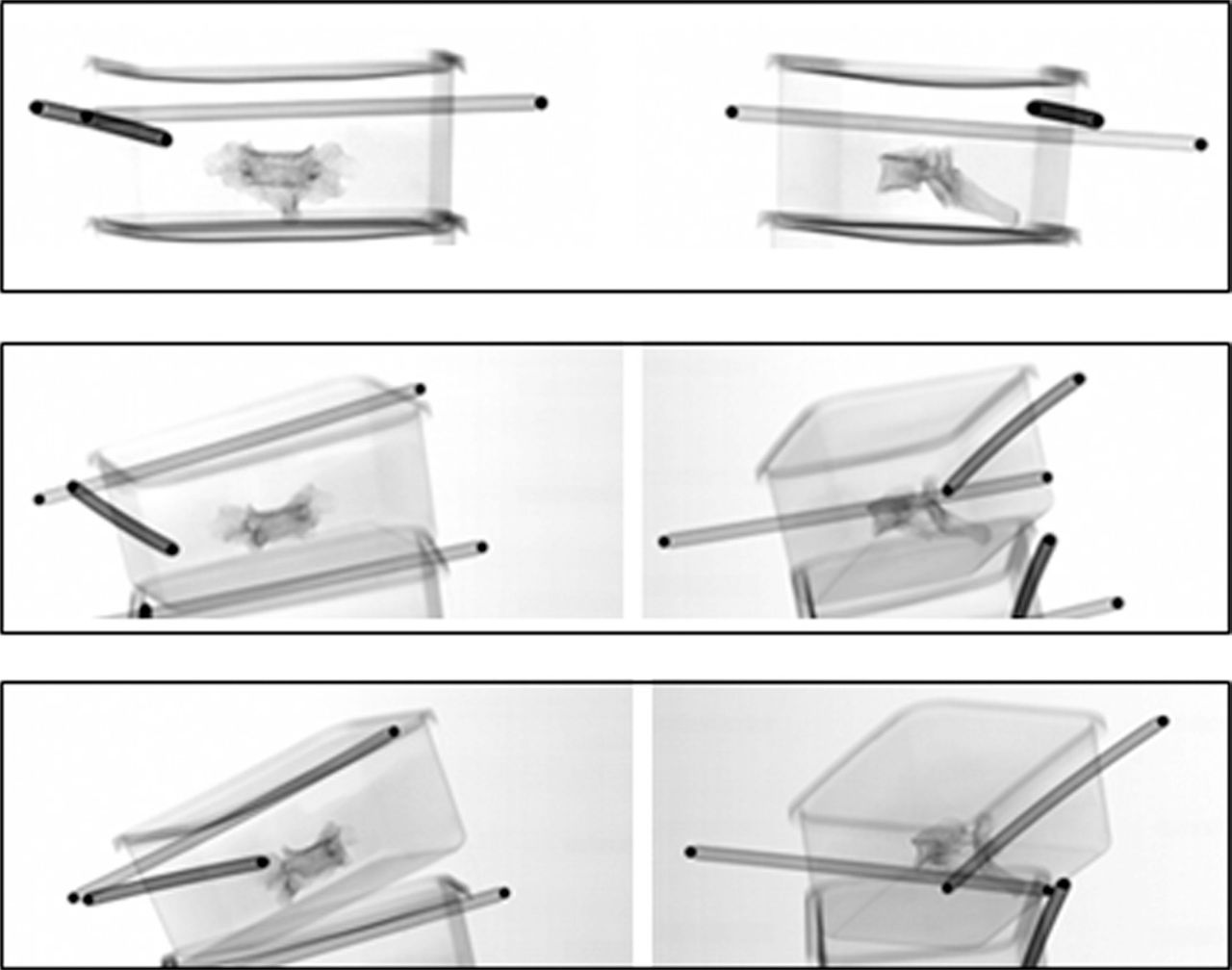
The systematic error was investigated in vitro. The C3-7 isolated vertebrae from 6 specimens were used in this study. Each vertebra was firmly placed into a box to which were attached 4 radiopaque markers (4 mm in diameter, 20 cm of distance from each other, 2 × 2 as in a cross). The device was placed in the EOS system, and the vertebral screw frame was determined as mentioned earlier by the 4-barycenter method; the 4 markers on the box were used as a reference method to compare with, as previously described for lumbar vertebrae.18 It was formerly noted in a preliminary Monte Carlo analysis that the 4-marker method provided a very stable and accurate screw frame to be used as a reference. Then, the position of the vertebra-and-box devices was randomly changed twice with recording of the new position by use of the vertebral and reference screw frames (Fig. 4). Accuracy in measuring the angular displacement was defined as the difference between the measurement using the vertebral screw frame and the measurement using the reference screw frame. The mean and standard deviation of the variable were calculated for X, Y′, and Z″ (n = 5 vertebrae × 6 specimens × 3 couples of positions × 90 values).

Example of biplanar radiographs of isolated, dry vertebrae bounded to the reference markers in various positions.
Results
Random error study
The standard deviation of the reproducibility variable regarding the angular displacement for X, Y′, and Z″ in vivo trended to be smaller in the prosthesis group with use of the prosthetic endplates as markers than in the control group with use of reconstructed vertebral envelops, based on the bony structures (Tables 1 and 2).
Standard deviation of reproducibility in measurement of intervertebral displacement with use of EOS system in X-Y′-Z″ mobile sequence of axes for control group (kinematics based on 3D reconstructions of vertebrae)
Standard deviation of reproducibility in measurement of intervertebral displacement with use of EOS system in X-Y′-Z″ mobile sequence of axes for prosthesis group (kinematics based on 3D files of prosthetic endplates)
Systematic error study
The mean value and standard deviation of the accuracy variable regarding the angular displacement in vitro by use of the vertebral objects in comparison to the reference methods was –0.1° ± 1.3° for X, 0.4° ± 1.8° for Y′, and –1.4° ± 3.2° for Z″.
Range of motion: Prosthesis group versus control group
The range of motion at the segmental level for the control and prosthesis groups is reported in Table 3. The range of motion was significantly different in flexion-extension between the prosthesis group and the control group. The range of motion was significantly smaller in the main plane of motion (Z″) in axial torsion of the neck and in the coupled plane of motion (Z″) in lateral bending.
Mean and standard deviation of range of motion in flexion, extension, right and left lateral bending, and right and left axial torsion
In this study we investigated the 3D kinematics of the cervical spine at the segmental level in vivo in the upright position in the case of cervical disc replacement. This is the first report of the use of the EOS stereoradiography system for this purpose. This study showed the feasibility and limits of the analysis of the 3D range of motion using this method in a control group and in a population of patients with cervical disc prostheses. The reproducibility and accuracy of the measurement based on bony shape and based on prosthetic markers were investigated for full interpretation of the results.
Because there are no reference values in vivo, the mean of the 2 measurements was considered the best estimate of the real value for investigating reproducibility. The best reproducibility was obtained in flexion-extension. This may be explained by the fact that sagittal motion is uniplanar, with a clear identification of the C3 to C7 vertebrae on the lateral views. In flexion-extension, reproducibility was similar to its value with the usual computer-assisted 2-dimensional methods.19 It is a noticeable advantage that the 3D EOS system does not require strict lateral views, as required with use of 2-dimensional software.
The component of axial torsion (the Z″ axis in this study) was less reproducible than X and Y′. The order of mobile axes, with Z″ last in the sequence of Briant (X-Y′-Z″), did not alter the results of the angular displacements. Stereoradiography uses the combination of anteroposterior and lateral views, which probably provides less information about axial torsion than flexion-extension and lateral bending displacements. Thorough analyses are necessary to improve the image processing in the EOS system for better reproducibility and accuracy in axial rotation.
The in vitro study made it possible to investigate accuracy because of the possibility of using a reference method (ie, external reference makers to the vertebra). It is likely that isolated vertebrae are probably more clearly identified that superimposed structures of a complete cervical spine. Again, the axial component (around the Z″ axis) was less accurate than the frontal and sagittal components in this study.
The analysis of the in vivo kinematics in the prosthesis showed a smaller range of motion when compared with the intervertebral displacements in the control population. Three-dimensional stereoradiographic data of the prosthesis had never before been reported. The results of the measurements must be kept within the context of the limitations of comparing healthy discs and facets of a young control population with artificial disc and pathologic facets of an older population. The control group was actually more designed to serve as a reference than to directly be compared with. It would be useful to use this 3D assessment system in patients preoperatively and postoperatively. Moreover, the number of cases was limited in this pioneering study aimed at testing the semistatic EOS 3-dimensionally. However, we notice in this study that the pattern for coupling was not modified in the case of the implantation of the prosthesis.
In conclusion, this study showed the possible use of EOS biplanar radiography for the assessment of the functional 3D kinematics of the cervical spine at the segmental (intervertebral) level. The reproducibility of the EOS stereoradiography method at the cervical spine improved with the use of the prosthesis itself rather than the bony structures. In this study the prosthesis replicated the pattern of motion of the normal cervical spine, although the range of motion trended to be lower.
- © 2011 Published by Elsevier Inc. on behalf of SAS - The International Society for the Advancement of Spine Surgery.
This is an Open Access article distributed under the terms of the Creative Commons Attribution-Noncommercial 3.0 Unported License, permitting all non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
In this issue




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Related Articles
Cited By...
- No citing articles found.